技术背景
现代社会当中发展日新月异,各项技术飞速且稳定的前进,所以在当今社会当中,想要保证不会出现爆炸事故其实相对来说会较为复杂。社会上的复杂性保障了排爆的困难和危险,对人的伤害性与环境的影响性,社会方面风气的扩散性都会造成较为严重的影响,需要得到及时控制。
发现爆炸可能时,需要进行一定程度的排爆行动,而此类行动对人的伤害与威胁性较大,在生命威胁方面难以避免,需要一些特殊的防护措施与步骤的完善。而如果使用双臂排爆机器人来进行排爆操作时,便能有效保障人员自身的安全与爆炸物的稳定。
现有技术
现如今市场上常见的排爆机器人使用环境多种,根据具体使用效果存在的差异,能够有效地保障自身使用环境具体且稳定的真实效力。
有的排爆机器人自身携带的机械臂相对来说较为呆板,在使用角度方面不够灵敏且迅速,容易导致使用时于某些特殊的角度而难以排上用场,真实效果当中可能也会因自由度不足而发生一定变化。
有的排爆机器人本身能够抓取的重量不多,正式使用时容易出现一定程度的影响效果,且在真实使用事态过程当中也会对此类环境有一定的影响,如果需要抓取更重的物体,此类机器人难以派上用场。
有的排爆机器人自身的防护效果不强,在面对爆炸的可能性存在事故时,一般状态下的防护无法对此类爆炸产生有效抵抗,而如果直接导致此机器人直面爆炸,则很可能因为防御不足而受到损坏。
技术介绍
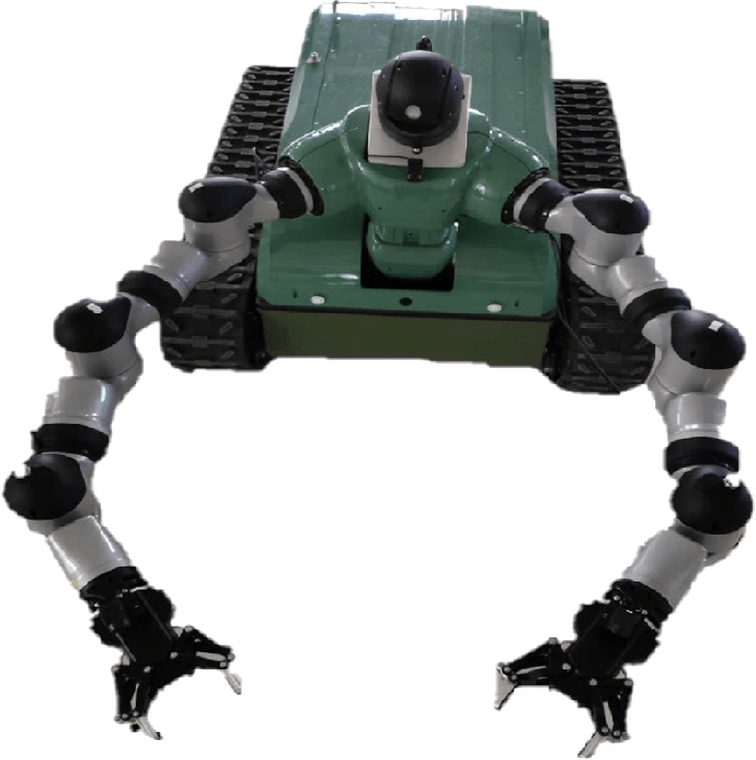
双臂排爆机器人主要是用来处理爆炸物相关工作的排爆式机器人,也可用于侦察人难以达到的地形的一种机器人。同时该装备采用拟人机械臂结构兼容人体姿态随动,手持控制,便携控制箱等多种人机交互操控方式,可实现双臂协同灵巧操作、双向语音通话、高清立体视频及回传反馈等功能。履带式底盘,极大提升越障和爬坡能力,可适应沙地、瓦砾、草地等多重复杂地形。同时新增的腰部自由度扩大了机器人的工作空间,更加方便机器人处理地面和高处任务。能够在非视距条件下,远程操控机器人打开拉链包裹、消防栓、垃圾桶等可疑载体,检查翻找危险品及自制炸弹;能够携带并使用柔性防爆罐,在非视距条件下,远程操控机器人完成从爆炸物抓取、转移、放置于排爆罐内、关闭排爆罐的全流程作业。
技术特点
1.★复合型控制方式:
Ø人体动作捕捉控制、便携式控制箱两类控制方式
2.★机械臂自由度多:
Ø2个机械臂可控自由度≥14个
3.★爬坡、爬楼性能优越:
Ø可攀爬 30 度斜坡
Ø可攀爬30 度楼梯
4.★机械臂抓取重量大:
Ø机械臂最大可抓取10kg重物
5.★多视角视频系统:
5路高清摄像机(1080P+4路960P)
6.★移动基站通:
解决非可视环境正常作战,通讯距离1km
应用情况



| 





 最新图文
最新图文